关于我们
公司简介
企业文化
荣誉资质
组织构架
新闻动态
公司新闻
行业动态
产品展示
智能机器人
核心技术
成功案例
特殊铸锻件制造
修复项目
轧辊再制造
打磨切割
联系我们
联系方式
招聘信息
咨询热线:18990293323
关于我们
公司简介
企业文化
荣誉资质
组织构架
新闻动态
公司新闻
行业动态
产品展示
智能机器人
核心技术
成功案例
特殊铸锻件制造
修复项目
轧辊再制造
打磨切割
联系我们
联系方式
招聘信息
温馨提醒
请输入关键词
返回
轨迹获取方式
轨迹获取方式
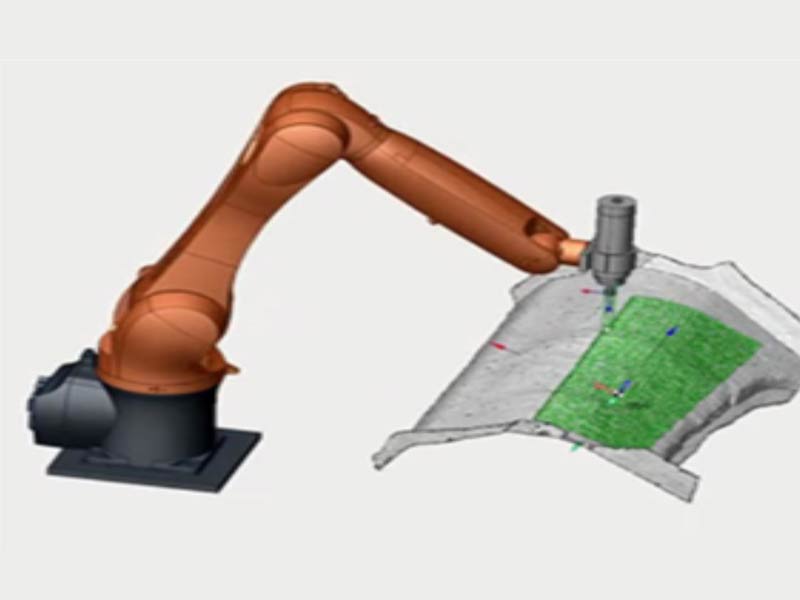
离线编程系统:采用专用离线编程软件对扫描/理论数模进行机器人运动轨迹编程,将编制好的程序预先存储在机器人系统中,生产时调用对应的程序便可作业。视觉引导在线编程系统:采用激光扫描在线系统对需要处理的工件表面进行视觉识别,以获取工件实际形貌并进行机器人路径规划编程,最后引导机器人完成作业。
产品参数
温馨提醒
部分页面暂未开通,敬请期待。